Carnegie Mellon Racing: Driverless Engineer
As a member of the driverless team on Carnegie Mellon Racing, I research novel algorithms to develop our very own autonomous racing vehicle. You can see an example of one of these vehicles in the video above. My main focus is on path planning algorithms, but I perform research in various topics such as localization, path-planning, and motion control.
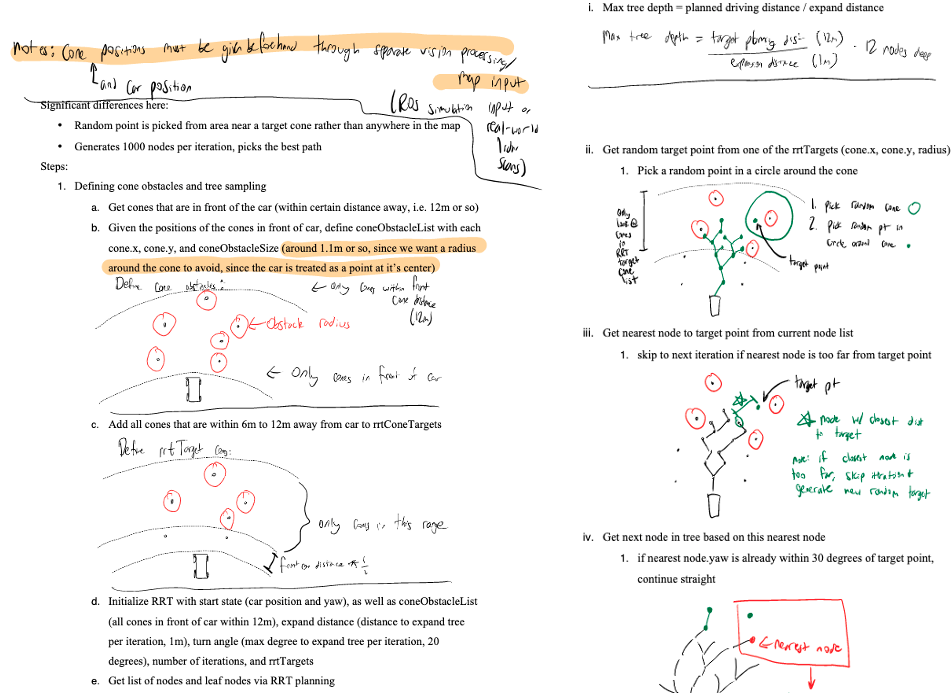
My research on path planning algorithms has led me to learning a lot about the rapidly-exploring random tree method. Above is an image of the notes that I presented to my team during a lecture I gave on this method. The next steps are to build out our simulation environment in order to verify that our algorithms are accurate.